আধা-স্বয়ংক্রিয় প্যানেল বেন্ডার EMBC 1402
পণ্য স্পেসিফিকেশন
| না. | নাম | প্যারামিটার | ইউনিট |
| 1 | সর্বোচ্চ দৈর্ঘ্য | 1400 | mm |
| 2 | সর্বোচ্চ প্রস্থ | 1400 | mm |
| 3 | মিন.নমন দৈর্ঘ্য | 200 | mm |
| 4 | নমন প্রস্থ | 260 | mm |
| 5 | সর্বোচ্চ নমন বেধ (MS,UTS410N/mm²) | 1 | mm |
| 6 | নূন্যতম নমন বেধ (MS,UTS410N/mm²) | 0.5 | mm |
| 7 | সর্বোচ্চ নমন উচ্চতা | 170 | mm |
| 8 | উপরের প্রেস ম্যানুয়াল দৈর্ঘ্য সমন্বয় মোড | ||
| 9 | গড় শক্তি খরচ | 2.2 | KW |
| 10 | ওজন | 15 | T |
বৈশিষ্ট্য এবং প্রধান গঠন
মেশিনের নকশা এবং উৎপাদনের ক্ষেত্রে, Hebei Hanzhi CNC Machinery Co., Ltd.প্রধানত নিম্নলিখিত পয়েন্টগুলিতে ফোকাস করে:
1. একটি বিপণন ধারণা যা ব্যবহারিকতা অনুসরণ করে এবং ব্যবহারকারীর প্রতিটি পয়সা সংরক্ষণ করে।
2. একটি খুব নির্ভরযোগ্য এবং সুনির্দিষ্ট নকশা ধারণা.
3. উচ্চ-মানের কাঁচামাল, কেনা অংশ এবং সূক্ষ্ম প্রক্রিয়াকরণ কৌশল।
4. ব্যবহার এবং রক্ষণাবেক্ষণ এবং নিরাপত্তা সহজতর উপর আরো জোর.
5. একই শিল্পে কম রক্ষণাবেক্ষণ হার এবং রক্ষণাবেক্ষণ খরচ।
ফ্রেম
A. একটি 3D সসীম উপাদান মডেল তৈরি করা: উন্নত এবং ডিজাইন করা 3D কঠিন মডেলের উপর ভিত্তি করে, গণনার জন্য একটি গতিশীল সসীম উপাদান মডেল তৈরি করা হয়েছে।মডেলটি বল স্থানান্তর সংযোগের প্রধান উপাদানগুলি বিবেচনা করে।সংযোগের মাধ্যমে বাহিনী বিয়ারিং-এ স্থানান্তরিত হয় এবং তারপরে ভারবহনের শক্তি বিশ্লেষণ করা হয়।
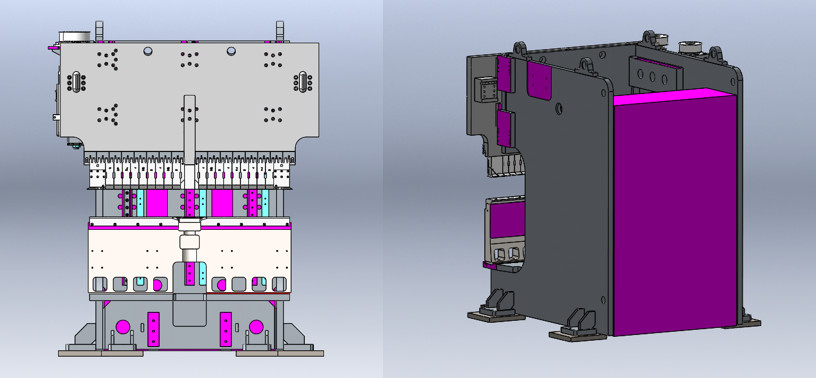
চিত্র 1 প্যানেল বেন্ডার সীমাবদ্ধ উপাদান সম্পূর্ণ মেশিনের গতিশীল মডেলিং
B. স্ট্যাটিক বিশ্লেষণ ফলাফল বিশ্লেষণ: ধীর মেশিনিং গতির কারণে, শক্তি বিশ্লেষণ একটি স্থির সমস্যা হ্রাস করা যেতে পারে।প্লেট কম্প্রেশন লোড এবং কাটার হেডের উল্লম্ব দিকে নমন লোডের উপর ভিত্তি করে, চাপ এবং বিকৃতির ফলাফলগুলি নীচে দেখানো হয়েছে।21.2mpa-এর সর্বোচ্চ চাপের সাথে শরীরের গলায় সর্বাধিক চাপ দেখা যায় এবং সর্বোচ্চ 0.30mm বিকৃতি সহ শরীরের উপরের প্রান্তে সর্বাধিক বিকৃতি দেখা যায়।
ফ্রেমের সীমিত উপাদান বিশ্লেষণের ফলাফল অনুসারে, Q345 ইস্পাত উপাদান হিসাবে নির্বাচিত হয়েছিল;কার্বন ডাই অক্সাইড শিল্ড ঢালাই গৃহীত হয়েছিল;ঢালাই দ্বারা উত্পন্ন চাপ দূর করার জন্য টেম্পারিং চিকিত্সা করা হয়েছিল;এইভাবে দীর্ঘমেয়াদী অপারেশনের জন্য সরঞ্জামের নির্ভুলতা, স্থিতিশীলতা এবং উচ্চ অনমনীয়তা নিশ্চিত করা।
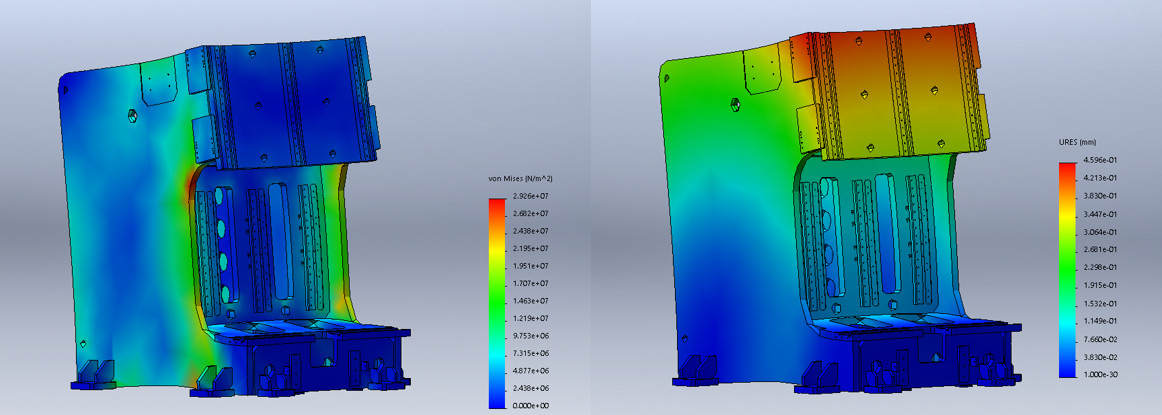
চিত্র 2 ফ্রেমের স্ট্রেস ডিসপ্লেসমেন্ট বিকৃতি বিশ্লেষণের ফলাফল
উপরের রাম
এই অংশে প্রধানত স্লাইডার, উচ্চ টর্ক সীসা স্ক্রু, রিডুসার, গাইড রেল, সার্ভো মোটর ইত্যাদি থাকে।প্রধান ড্রাইভটি সার্ভো মোটর দ্বারা নিয়ন্ত্রিত হয় এবং নিয়ন্ত্রণ মোডটি সার্ভো সিঙ্ক্রোনাস নিয়ন্ত্রণ, যা কার্যকরভাবে অবস্থান নির্ভুলতা, দ্রুত গতি এবং উচ্চ নিয়ন্ত্রণযোগ্যতা নিশ্চিত করতে পারে।সীসা স্ক্রু এবং গাইড রেলের তৈলাক্তকরণ স্বয়ংক্রিয় তৈলাক্তকরণ গ্রহণ করে এবং গ্রীস 00 #, যা দীর্ঘ সময়ের অপারেশনের জন্য সীসা স্ক্রু এবং গাইড রেলের পরিষেবা জীবন এবং নির্ভুলতা নিশ্চিত করে।
উপরের স্লাইডারের স্ট্যাটিক বিশ্লেষণের ফলাফল: উপরের টেবিলের স্ট্রেস ডিসপ্লেসমেন্ট কিডনি ডায়াগ্রাম দেখায় যে সর্বোচ্চ চাপ উপরের অংশে প্রদর্শিত হয়, সর্বোচ্চ স্ট্রেস 152mpa, সর্বোচ্চ বিকৃতি উপরের টেবিলের উপরের প্রান্তে প্রদর্শিত হয়, সর্বাধিক বিকৃতি 0.15 মিমি
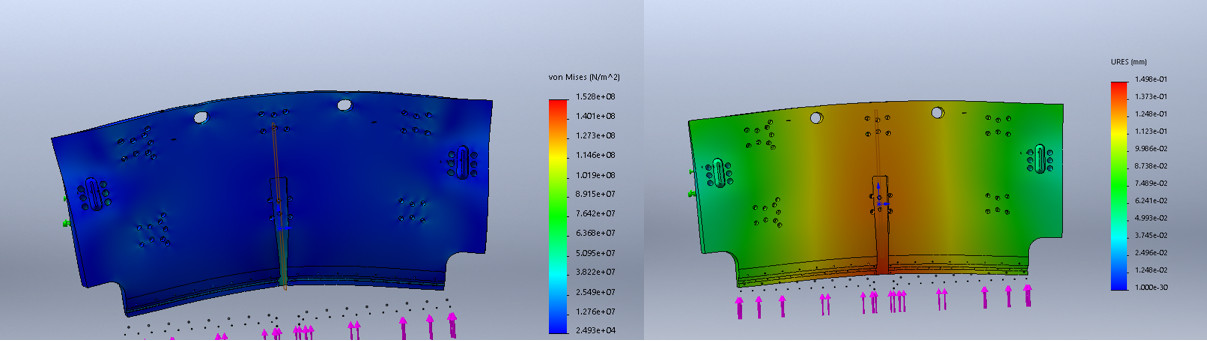
চিত্র 3 রাম এর স্ট্রেস ডিসপ্লেসমেন্ট বিশ্লেষণের ফলাফল
রাম এর সীমিত উপাদান বিশ্লেষণের ফলাফল অনুসারে, Q345 ইস্পাত উপাদান হিসাবে নির্বাচিত হয়েছিল;CO2 ঢালযুক্ত ঢালাই ব্যবহার করা হয়েছিল;ঢালাই দ্বারা সৃষ্ট চাপ দূর করতে টেম্পারিং চিকিত্সা করা হয়েছিল;এইভাবে দীর্ঘমেয়াদী অপারেশনের জন্য সরঞ্জামের নির্ভুলতা, স্থিতিশীলতা এবং উচ্চ অনমনীয়তা নিশ্চিত করা।
নমন ইউনিট
নমন ইউনিটের পাওয়ার ড্রাইভ অংশটি একটি হাইড্রোলিক সিস্টেমের জড়িত ছাড়াই একটি সার্ভো মোটর দ্বারা চালিত হয়, যা শক্তি সঞ্চয় এবং পরিবেশ সুরক্ষা নীতির সাথে সামঞ্জস্য রেখে উপাদানগুলির পরিধান এবং ছিঁড়ে যাওয়া এবং সংক্রমণ দক্ষতা হ্রাস করার ক্ষেত্রে দুর্দান্ত সুবিধা রয়েছে। রাষ্ট্র দ্বারা
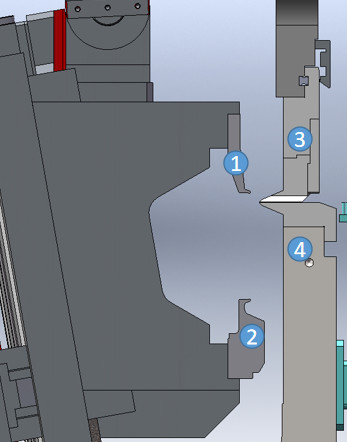
শীট তথ্যের সেটিং অনুসারে, সিস্টেমটি স্বয়ংক্রিয়ভাবে উপরের প্রেস ছুরি 3 এর অবস্থান গণনা করে এবং শীটটি ঠিক করতে উপরের প্রেস ছুরি 3 এবং নিম্ন প্রেসের ছুরি 4 এর মধ্যে দূরত্ব নিয়ন্ত্রণ করে;সিস্টেম সেটিং অনুসারে, এই বাঁকটি উপরে বা নীচে হোক, নিম্ন প্রেসের ছুরি 2 বা উপরের প্রেসের ছুরি 1টি দ্রুত নমন অবস্থানে যাওয়ার জন্য নিয়ন্ত্রিত হয়;বিভিন্ন সেটিং কোণ অনুসারে, নমন ছুরিটি নমন সম্পূর্ণ করার জন্য পেটেন্ট কোণ গণনা সূত্রের মাধ্যমে গণনাকৃত অবস্থানে যাওয়ার জন্য নিয়ন্ত্রিত হয়।
নমনের বিভিন্ন উপায় অনুসারে, কোণ নমন, বড় চাপ বাঁক, চ্যাপ্টা নমন ইত্যাদিতে বিভক্ত করা যেতে পারে, কোন কোণ নমন ঊর্ধ্বমুখী নমন এবং নিম্নগামী নমনে বিভক্ত।
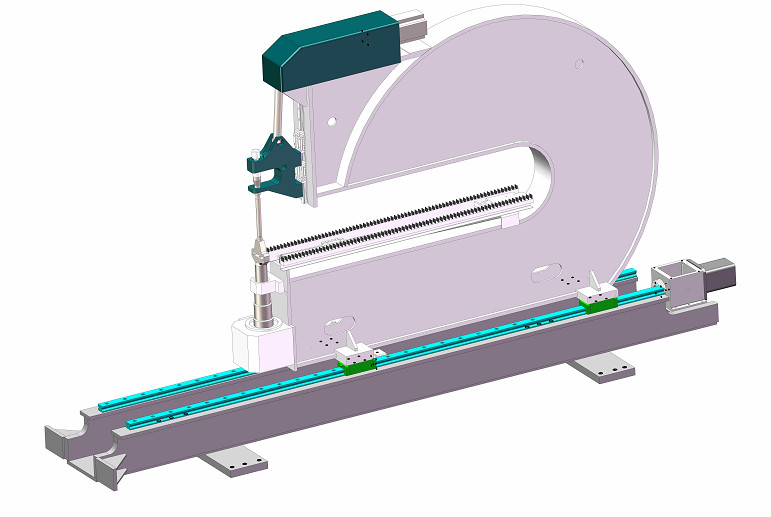
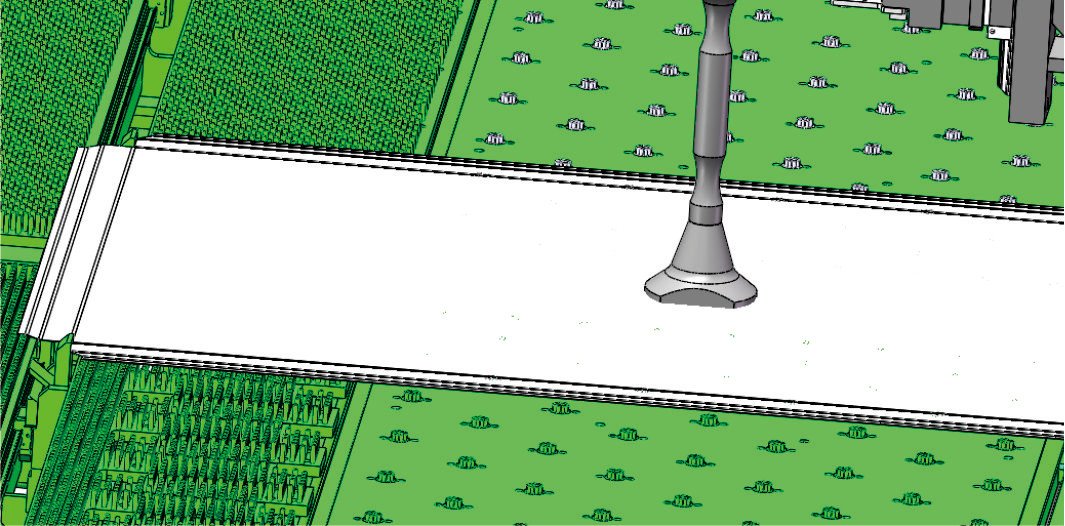
উপরের প্রেস ইউনিট
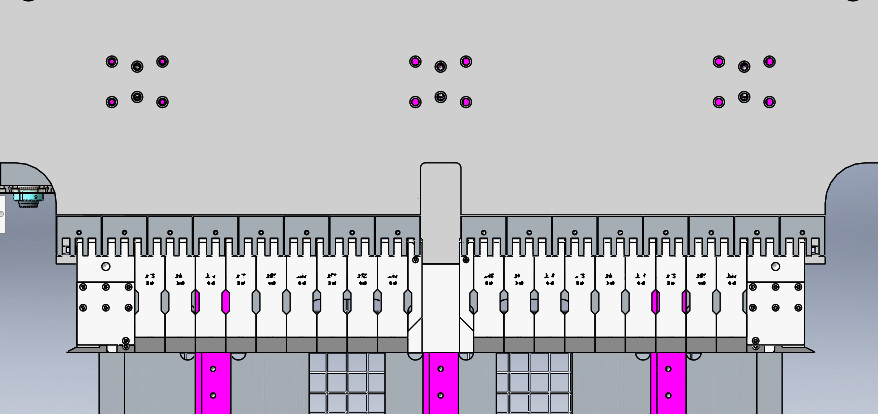
Fig.6 উপরের প্রেস ইউনিট
উপরের প্রেস ইউনিট: সমস্ত নমন প্রক্রিয়ার একটি অংশ, EmbC সম্পূর্ণ সার্ভো বহুপাক্ষিক নমন কেন্দ্রটি একটি বিশেষ উপরের প্রেস ইউনিট দিয়ে সজ্জিত যা বিভিন্ন প্লেটের দৈর্ঘ্যের জন্য ম্যানুয়ালি ইনস্টল এবং সামঞ্জস্য করা যেতে পারে।
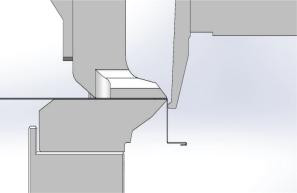
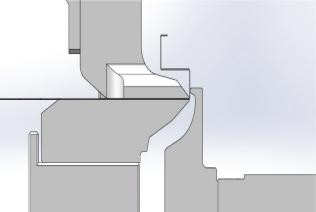
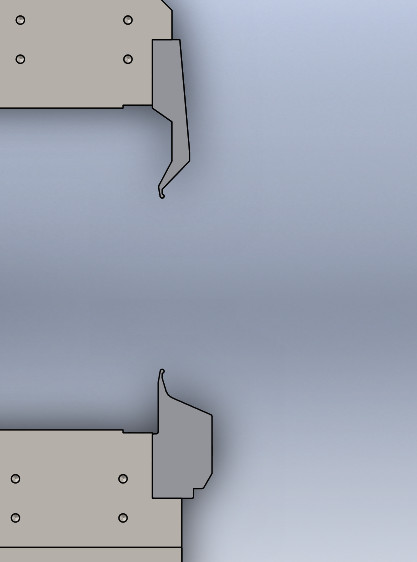
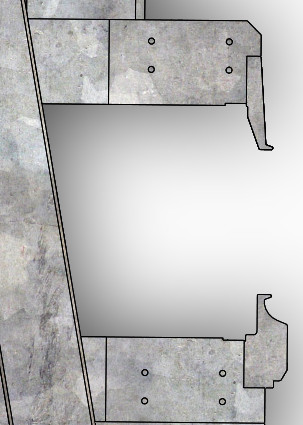
পরিহার নমন বাক্সের প্রয়োজনীয়তা পূরণ করার জন্য, আমরা একটি বিশেষ পরিহার ডাই তৈরি করেছি।প্রেস করার আগে, এড়িয়ে যাওয়া ডাইয়ের একটি অংশ ডায়াগ্রামে চাপ দেওয়ার আগে রাজ্যে থাকে এবং খাওয়ানো শুরু হয়।খাওয়ানোর পরে, এটি ডায়াগ্রামে টিপে এবং নমন শুরু হওয়ার পরে অবস্থায় রয়েছে।নমনের পরে, উপরের স্লাইডারটি সরে যায়।উপরের স্লাইডারের নড়াচড়ার সময়, অংশ A টিপানোর আগে স্বয়ংক্রিয়ভাবে রাজ্যে চলে যাবে।উপরের স্লাইডারটি সেট অবস্থানে চলে যাওয়ার পরে, পরবর্তী আন্দোলন শুরু হয়।
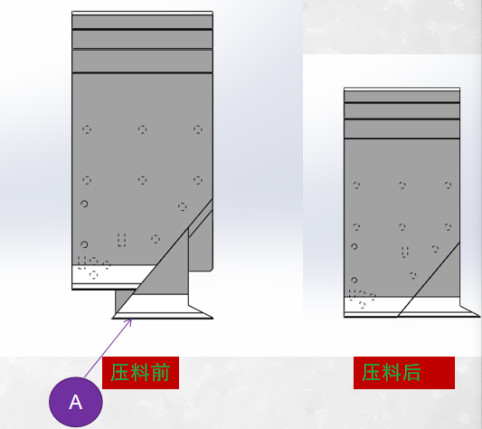
Fig.7 নমন বক্স পরিহার
টুল
নমন সরঞ্জামগুলি উপরের নমন সরঞ্জাম এবং নিম্ন নমন সরঞ্জামগুলিতে বিভক্ত।বিশেষ নমন সরঞ্জাম গ্রাহকের বিভিন্ন প্রয়োজনীয়তা অনুযায়ী কাস্টমাইজ করা যেতে পারে।
2. প্লেট খাওয়ানো ইউনিট:
শীট মেটালের গতিবিধি, ক্ল্যাম্পিং এবং ঘূর্ণন যথাক্রমে রোবট 1, ফিক্সচার 2 এবং ঘূর্ণায়মান ডিস্ক 3 দ্বারা নিয়ন্ত্রিত হয়।পুরো মেশিনিং প্রক্রিয়া চলাকালীন, শীট মেটাল খাওয়ানো সার্ভো মোটর দ্বারা নিয়ন্ত্রিত হয়, অটোমেশন এবং দ্রুত অবস্থান সক্ষম করে, চলাচলের সময় হ্রাস করে এবং দক্ষতা বৃদ্ধি করে।কাঠামোগত উদ্ভাবন এবং সম্পূর্ণ সার্ভো নিয়ন্ত্রণের প্রয়োগের জন্য ধন্যবাদ, শীট মেটালের ক্ল্যাম্পিং এবং ঘূর্ণন বহুপাক্ষিক নমন কেন্দ্রের কার্য প্রক্রিয়া জুড়ে নির্ভুলতা বজায় রাখতে সক্ষম।অনেক জটিল ওয়ার্কপিস, এমনকি বহুভুজাকারের জন্য, 0.001 এর একটি অবিচ্ছিন্ন ঘূর্ণন নির্ভুলতা নিশ্চিত করা যেতে পারে।
3.প্লেট পজিশনিং ইউনিট:
প্লেট পজিশনিং ইউনিটে একটি বাম পজিশনিং পিন, একটি ডান পজিশনিং পিন, একটি ফ্রন্ট পজিশনিং পিন এবং একটি রিয়ার পজিশনিং পিন থাকে;বাম এবং ডান পজিশনিং পিন প্লেটটিকে বাম এবং ডানে অবস্থান করে।ফ্রন্ট পজিশনিং পিন এবং রিয়ার পজিশনিং পিন প্লেটের সামনের এবং পিছনের অবস্থানকে নিয়ন্ত্রণ করে এবং নিশ্চিত করে যে প্লেটটি উপরের এবং নীচের প্রেসের ছুরিগুলির সমান্তরাল, যা প্লেটের অবস্থান নির্ভুলতা নিশ্চিত করতে ব্যবহৃত হয়।
প্লেট পজিশনিং ইউনিট স্বয়ংক্রিয়ভাবে প্লেটের অবস্থান করতে পারে এবং স্বয়ংক্রিয়ভাবে এক সময়ে বহুপাক্ষিক নমন সম্পূর্ণ করতে পারে, যা নমন চক্রের সময়কে ব্যাপকভাবে ছোট করে, প্রথম নমনে প্লেটের শিয়ারিং ত্রুটি নিয়ন্ত্রণ করে এবং নমনের যথার্থতা নিশ্চিত করে।
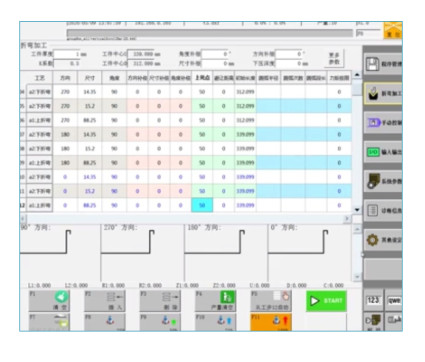
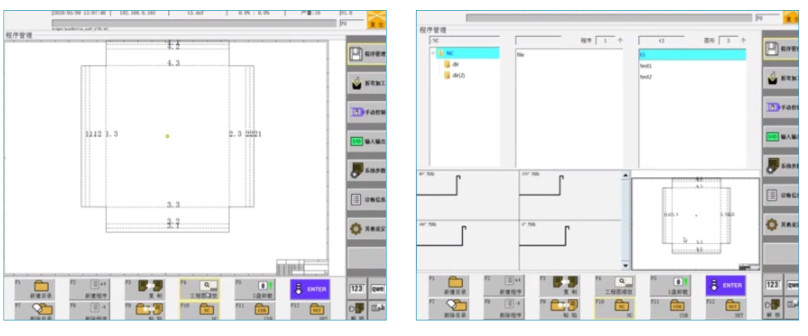
4.CNC সিস্টেম
উত্তর: যৌথভাবে উন্নত সিএনসি সিস্টেম এবং সফ্টওয়্যারগুলি দ্রুত এবং সহজে প্রয়োগ এবং পরিচালনা করা যেতে পারে
বি: মূল বৈশিষ্ট্য।
ক)উচ্চ হস্তক্ষেপ প্রতিরোধের সঙ্গে EtherCAT বাস নিয়ন্ত্রণ পদ্ধতি
b) সরাসরি প্রোগ্রামিং সমর্থন করে, প্রতিটি ধাপের জন্য নমন ডেটা ফর্মে প্রবেশ করা যেতে পারে
c) বাঁকা নমন জন্য সমর্থন
ঘ) সম্পূর্ণ বৈদ্যুতিক সার্ভো নিয়ন্ত্রণ
e) নমন ক্ষতিপূরণ জন্য সমর্থন
চ) দ্বি-মাত্রিক প্রোগ্রামিংয়ের জন্য সমর্থন
2D প্রোগ্রামিং ফাংশন, 2D DXF অঙ্কন ডেটা আমদানি করুন, স্বয়ংক্রিয়ভাবে নমন প্রক্রিয়া, নমন আকার, নমন কোণ, ঘূর্ণন কোণ এবং অন্যান্য ডেটা তৈরি করুন।নিশ্চিতকরণের পরে, স্বয়ংক্রিয় নমন প্রক্রিয়াকরণ করা যেতে পারে
প্রধান অংশের তালিকা
| না. | নাম | ব্র্যান্ড |
| 1 | ফ্রেম | প্রজ্ঞা |
| 2 | টুল | প্রজ্ঞা |
| 3 | নমন ইউনিট | প্রজ্ঞা |
| 4 | সিএনসি সিস্টেম | প্রজ্ঞা |
| 5 | সার্ভো মোটর | প্রজ্ঞা |
| 6 | সার্ভো ড্রাইভার | প্রজ্ঞা |
| 7 | রেল | প্রজ্ঞা |
| 8 | বলস্ক্রু | প্রজ্ঞা |
| 9 | হ্রাসকারী | তাইওয়ান |
| 10 | ব্রেকার | স্নাইডার |
| 11 | বোতাম | স্নাইডার |
| 12 | বৈদ্যুতিক অংশ | স্নাইডার |
| 13 | তারের | ইকু |
| 14 | প্রক্সিমিটি সুইচ | ওমরন |
| 15 | ভারবহন | এসকেএফ/এনএসকে/এনএআইসিএইচ |
4) মেশিন টুলের নকশা, উত্পাদন, পরিদর্শন এবং ইনস্টলেশন নিম্নলিখিত মানগুলি পূরণ করে।
1, GB17120-1997
2, Q/321088JWB19-2012
3,GB14349-2011
খুচরা অংশ এবং টুল তালিকা
| না. | নাম | Qt. | মন্তব্য |
| 1 | টুল বক্স | 1 | |
| 2 | প্যাড ইনস্টল করুন | 8 | |
| 3 | Inner ষড়ভুজ স্প্যানার | 1 সেট | |
| 4 | ম্যানুয়াল রিফুয়েলিং বন্দুক | 1 | |
| 5 | সিএনসি সিস্টেম ম্যানুয়াল | 1 | |
| 6 | খোলা স্প্যানার | 1 |





