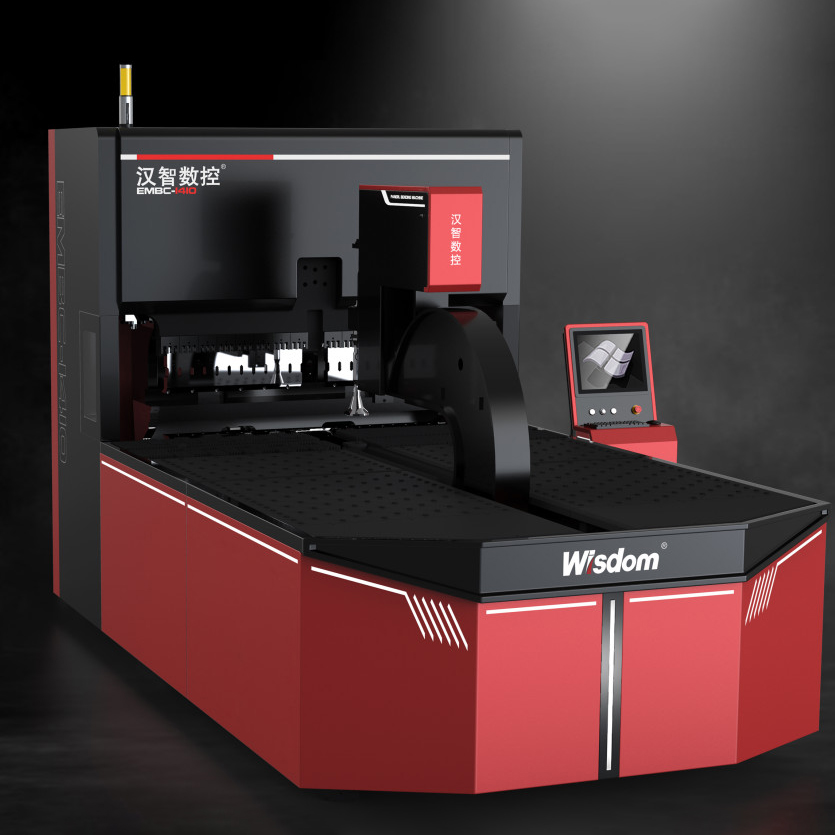
ডাউন-অ্যাক্টিং হাইড্রোলিক সিএনসি প্রেসব্রেক
বৈশিষ্ট্য
ডাউন-অ্যাক্টিং অ্যাসেন্ট ব্যবহার করে বড় ওয়ার্কপিসগুলির সহজ মেশিনিং সক্ষম করে৷ Dr/ve ডিভাইসটি সরঞ্জামের মূল অংশের নীচের অংশে লুকানো থাকে, যা ফ্রেমের মধ্যে স্থান সংরক্ষণ করে এবং এমনকি আরও বড় ওয়ার্কপিসগুলিকে প্রক্রিয়া করতে পারে৷
• ওয়ার্কপিসের মাঝখানে অপর্যাপ্ত বল রোধ করতে কেন্দ্রীয় চাপ ব্যবহার করে
উচ্চ-নির্ভুল পণ্যের প্রক্রিয়া/এনজি পূরণ করতে।
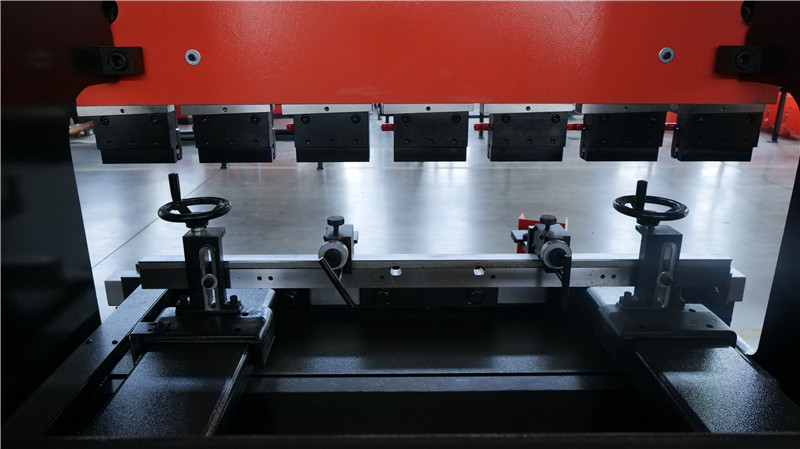
• প্রক্রিয়াকরণের সময়, ওয়ার্কটেবলটি স্থিতিশীল থাকে এবং নড়াচড়া করবে না। রোলার গাইড
মেকানিজম নীচের সামনে, পিছনে, বাম এবং ডান দিকে সাজানো হয়
ওয়ার্কটেবল, যা ওয়ার্কটেবলকে মসৃণভাবে সরাতে পারে এবং সহজেই সামঞ্জস্য করতে পারে
রোলার এবং গাইড ব্লকের মধ্যে ফাঁক, যাতে ওয়ার্কটেবলের গাইড পরিধান কমিয়ে আনা যায়।
• চমৎকার ফ্রেম স্ট্রাকচার ডিজাইন দীর্ঘমেয়াদী ব্যবহারের পরেও উচ্চ নির্ভুলতা প্রয়োজনীয়তা রাখে।উপরের ওয়ার্কটেবলটি তির্যক ব্লক ফিক্সিং পদ্ধতি গ্রহণ করে
ওয়েল্ডিং ফ্রেমে বিকৃতি এবং ডি/স্টর্বান্স এড়িয়ে চলুন এবং দীর্ঘমেয়াদী ব্যবহারের যথার্থতা নিশ্চিত করুন।প্রক্রিয়াকরণের সময় ফ্রেমের মাইক্রো-ইলাস্টিক বিকৃতি হতে পারে
ওয়ার্কবেঞ্চের সামনে সূক্ষ্ম সুরে থাকুন।
• নিম্ন সারণীর নিম্ন সীমা পজিশন/টেশন এনকোডার পজিশন পড়ে সেট করা হয়।
এই Des/gn-এ, বিভিন্ন নিম্ন সীমা পজিশন/বিভিন্ন বেন্ড অনুযায়ী সেট করা যেতে পারে-
ইং দৈর্ঘ্য, যার ফলে নমন দক্ষতা উন্নত.
• ধাপে ধাপে আর্ক বেন্ডিং ফাংশন দিয়ে ডিজাইন করা হয়েছে, এবং ব্যাক গেজ সমান দূরত্বে ওয়ার্ডের দিকে চলে যায়।প্রতিবার এটি নড়াচড়া করার সময়, একটি বাঁক তৈরি হয় এবং কাঙ্খিত রেডিয়ান এবং অন্তর্ভুক্ত কোণটি বহুবার বাঁকানোর পরে গঠিত হয়।
• ব্যাক-পুল অ্যাভয়েডেন্স ফাংশন, ব্যাক-পুল পজিশন/টেশন এবং ব্যাক-পুল বিলম্ব সেট করে, ওয়ার্কপিসটিকে ব্যাক স্টপের সাথে দ্বন্দ্ব থেকে আটকানো যেতে পারে
ওয়ার্কপিস মেশিন করার প্রক্রিয়া।
• নমন টুকরা মোট সংখ্যা গণনা ফাংশন.
Mquick স্প্লিন্ট ব্যবহার করা সহজ এবং একটি পেটেন্ট জন্য আবেদন করা হয়েছে.
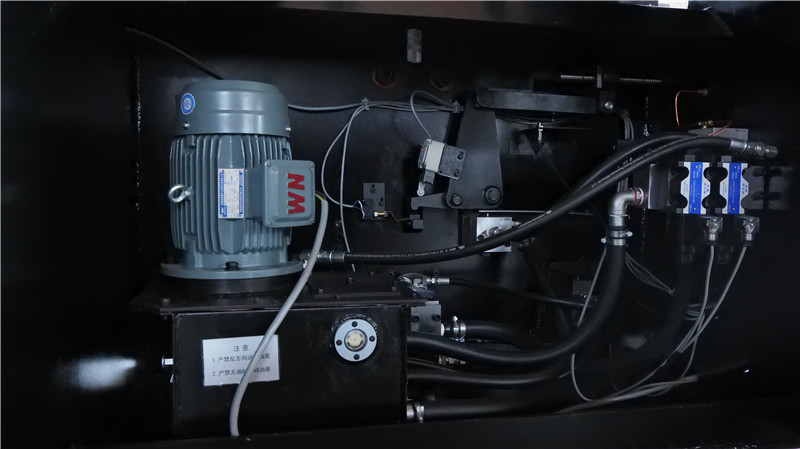
• যখন লোয়ার বেন্ডিং মেশিন ঊর্ধ্বমুখী এবং বাঁকানো হয়, তখন মোটর গিয়ার পাম্পকে আউটপুট ফোর্সে চালায়, এবং যখন এটি নামতে থাকে এবং ফিরে আসে, তখন এটি ওয়ার্কটেবলের ওজন দ্বারা উপলব্ধি করা হয়, এবং মোটর আইডলিং শক্তি সঞ্চয় করে।
• Wy-100 একটি এমএ/এন তেল সিলিন্ডার এবং দুটি সহায়ক তেল সিলিন্ডারের তেল সার্কিট ডিজাইন গ্রহণ করে, যা নিম্ন ওয়ার্কটেবলের সিঙ্ক্রোনাস অ্যাকশনকে বাস্তব/জেই করতে পারে, আউটপুটটি অভিন্ন, এবং ওয়ার্কটেবলটি সহজে বিকৃত হয় না।
পণ্য স্পেসিফিকেশন
| মডেল এবং সম্পর্কিত কনফিগারেশন | ||
| মোড | WY-100 | WY-35 |
| সিএনসি সিস্টেম | হলিসি5 | হলিসিস |
| সার্ভো সিস্টেম | প্যানাসনিক/ফুজ | প্যানাসনিক/ফুজ |
| সার্ভো মোটো | প্যাংসোনিক/ফুজ | প্যানাসনিক/ফুজ |
| ফোর্স (কেএন) | 1000 | 350 |
| নমন দৈর্ঘ্য (মিমি) | 3000 | 1400 |
| আপ-ডাউন স্ট্রোক (মিমি) | 100 | 100 |
| গলার গভীরতা (মিমি) | 405 | 300 |
| নং সিলিন্ডার | 3(1 mgin.2 সহায়ক) | 1 |
| গতি বৃদ্ধি (মিমি/সেকেন্ড) | 58 | 46 |
| নমন গতি (মিমি/সেকেন্ড) | 10.8 | 8 |
| কাছাকাছি গতি (মিমি/সেকেন্ড) | 52 | 40 |
| ব্যাফেলের উপরের এবং নীচের মাত্রা (মিমি) | 55-140 | 55-140 |
| বিভ্রান্তির অনুমতিযোগ্য বল(N) | 100 | 100 |
| ব্যাকগেজ অবস্থান নির্ভুলতা (মিমি) | ±0.1 | ±0.1 |
| এক্স অক্ষ স্ট্রোক(মিমি) | 430 | 430 |
| এক্স-অক্ষ সর্বোচ্চখাওয়ানোর গতি (মিমি/মিনিট) | 15 | 15 |
| এক্স-অক্ষ রিপজিশনিং নির্ভুলতা(মিমি) | ±0.02 | ±0.02 |
| মোটর শক্তি (KW) | 5.5 | 2.2 |
| ওজন (কেজি | 6700 | 2200 |
| তেল ট্যাংক ক্ষমতা (L) | 65 | 30 |
বিস্তারিত শো